 旺旺头条
旺旺头条BEV感知任务真的很稳定吗?极端情况下怎么样?30+SOTA算法全面探析~

01
写在前面
它促进了从多视图图像中的统一学习;
它鼓励了一种在物理上可解释的方法,用于跨时间实例融合信息;
其输出域与多个下游应用(如预测和规划)无缝对齐,这强化了以视觉为中心的3D感知框架的性能指标;
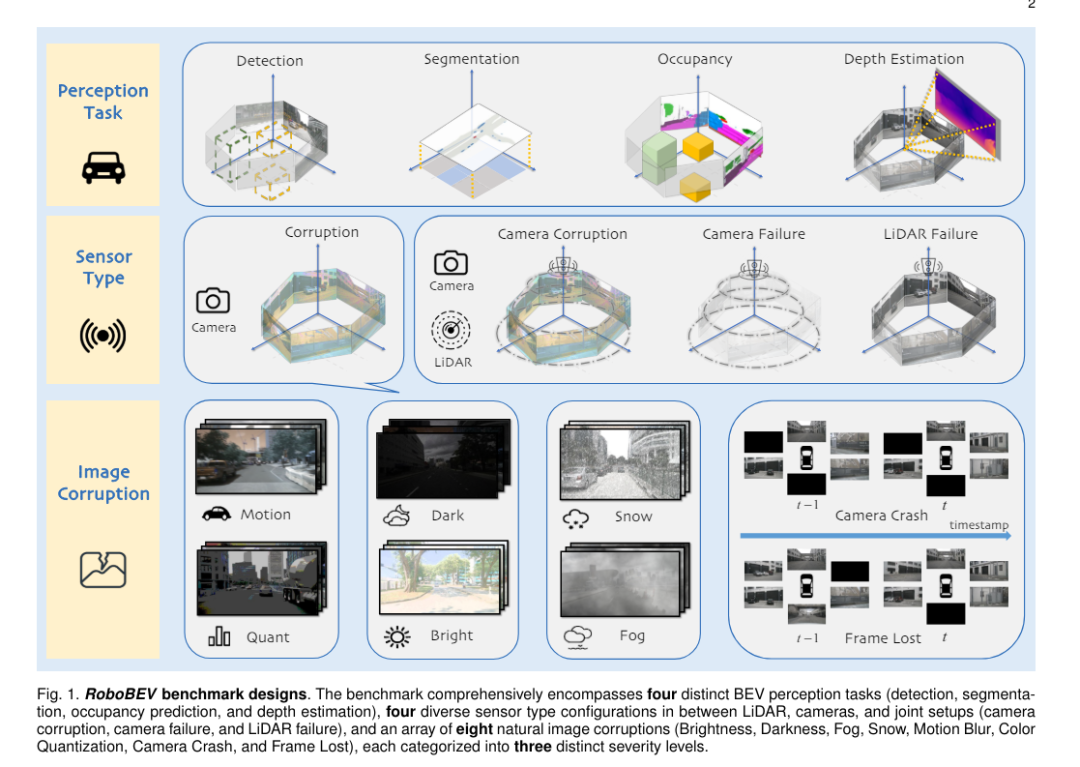
介绍了RoboBEV,一个全面的基准测试套件,用于评估在各种自然干扰下BEV感知的鲁棒性。
进行了大量实验,以评估30个基于camera的和3个基于camera-lidar融合的BEV感知算法的性能。这些算法在八种不同的干扰下进行了评估,每种干扰都在三个不同的严重程度下应用,共涉及四个感知任务。
研究通过深入分析导致干扰场景下鲁棒性的因素,提供了有价值的见解,为未来的模型设计提供了启示。主要观察结果是:i) 绝对性能与干扰下的性能有很强的相关性。然而,随着标准性能的提高,相对鲁棒性并不一定增加;ii) 模型预训练与无深度BEV转换相结合具有很大潜力来增强鲁棒性;iii) 利用长而丰富的时间信息在很大程度上增强了鲁棒性。
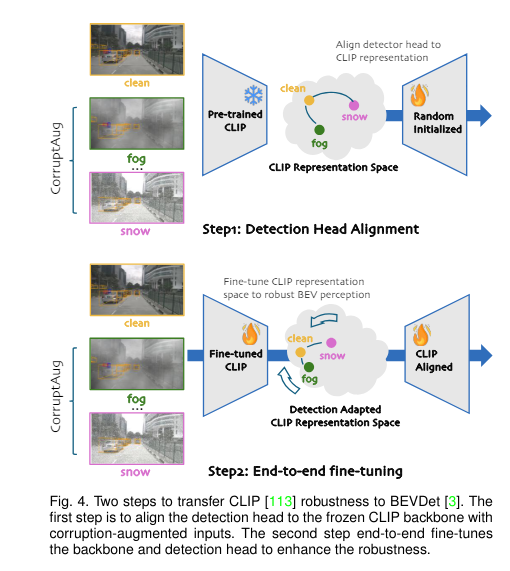
基于观察,提出了利用CLIP模型作为主干网络来进一步提高BEV感知模型的鲁棒性。
将数据集和基准测试工具包公开,旨在鼓励研究社区复制和扩展我们的发现。
02
BEV感知的一些基础回顾
1)Model Pre-Training
2)Temporal Fusion
3)Camera-LiDAR融合
4)BEV View Transformation
03
Benchmark设计
1)数据生成
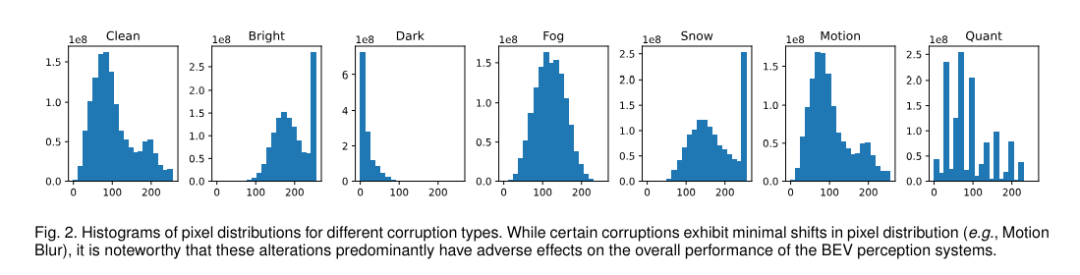
2)自然失真
3)鲁棒Metrics


04
Benchmark实现
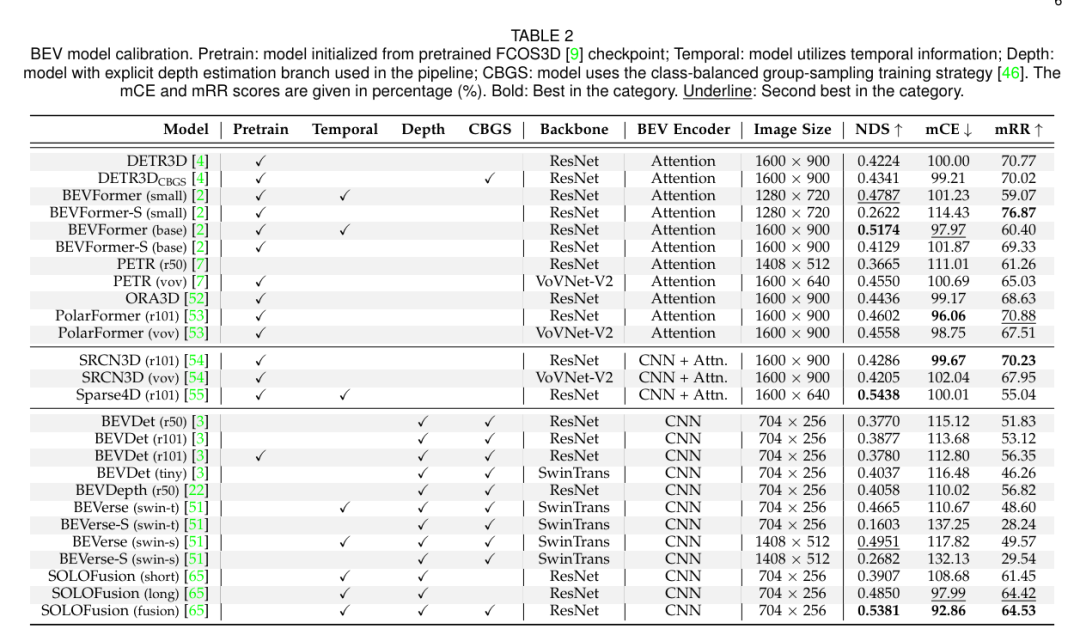
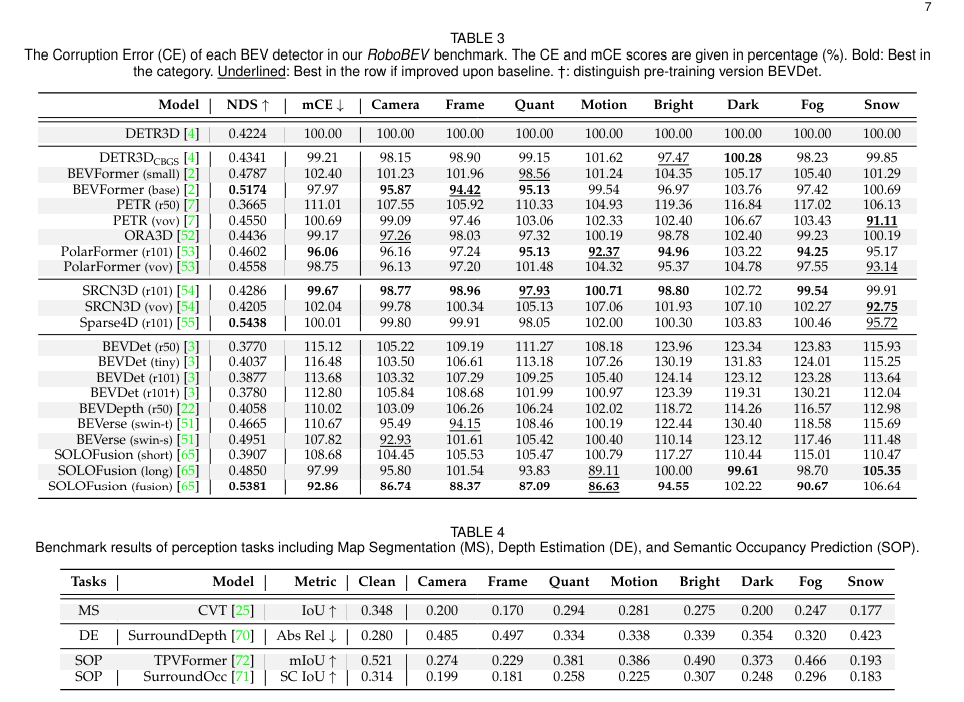
1)Camera-Only Benchmark
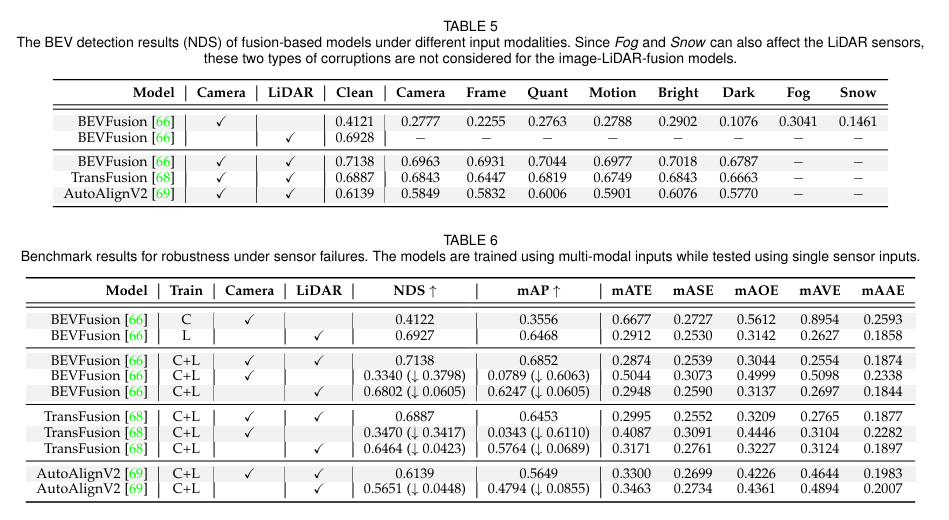
2)Camera-LiDAR Fusion Benchmark
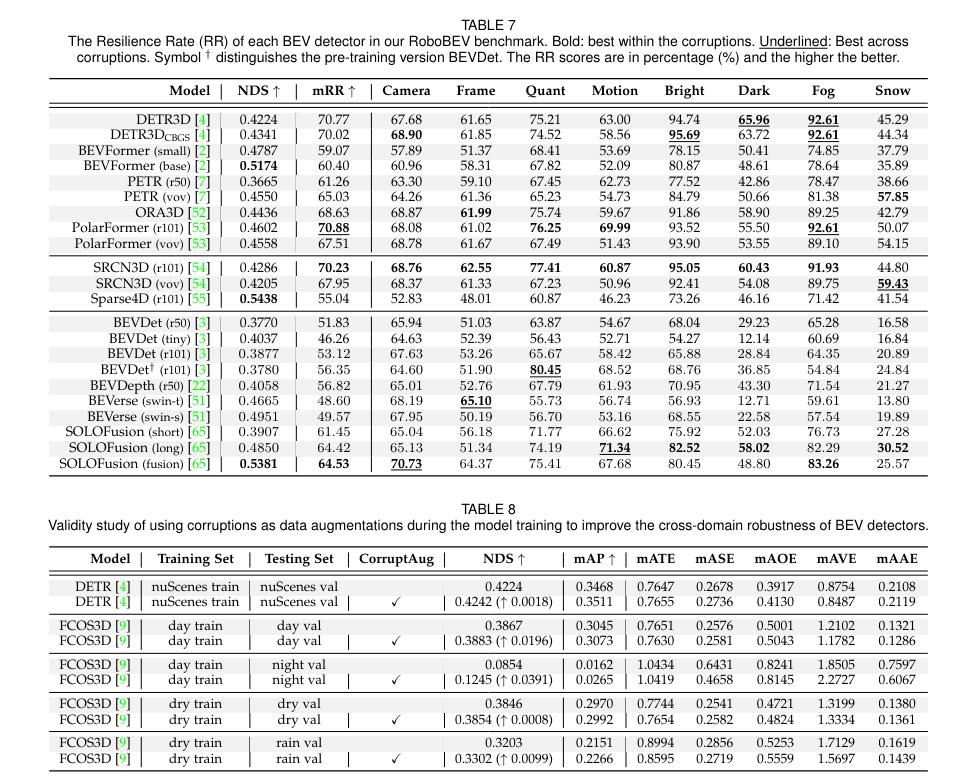
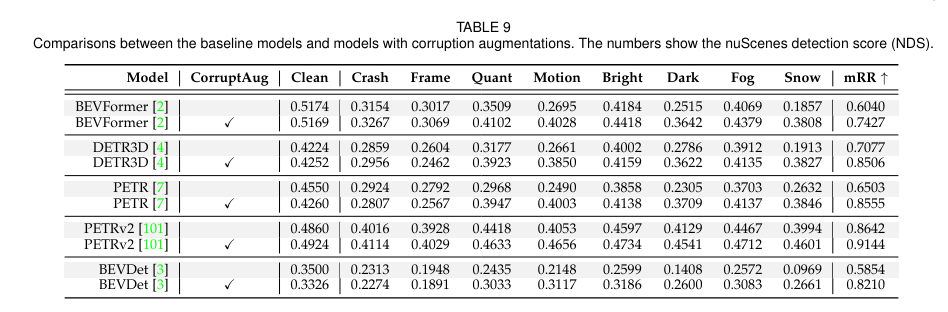
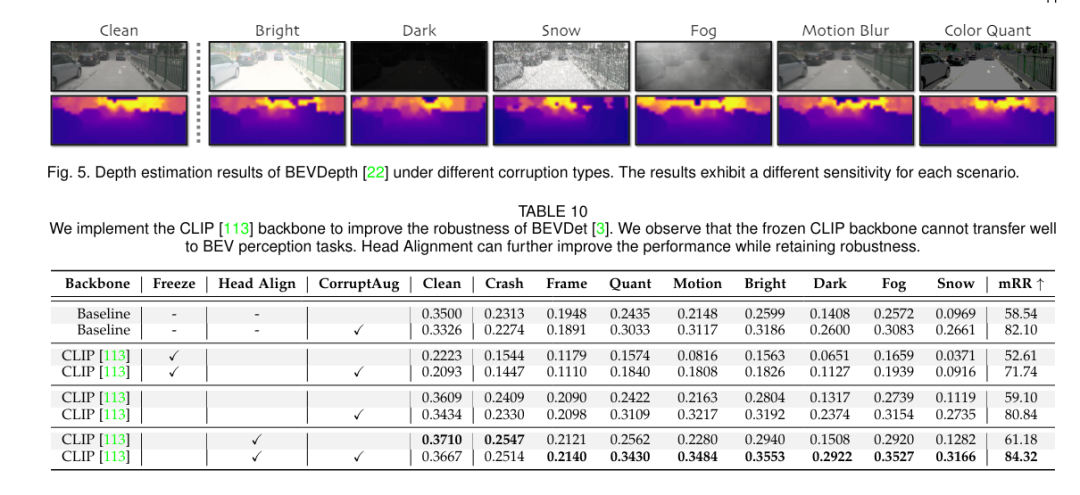
3)有效性评估与鲁棒性改进
05
分析和讨论
1)Depth Estimation
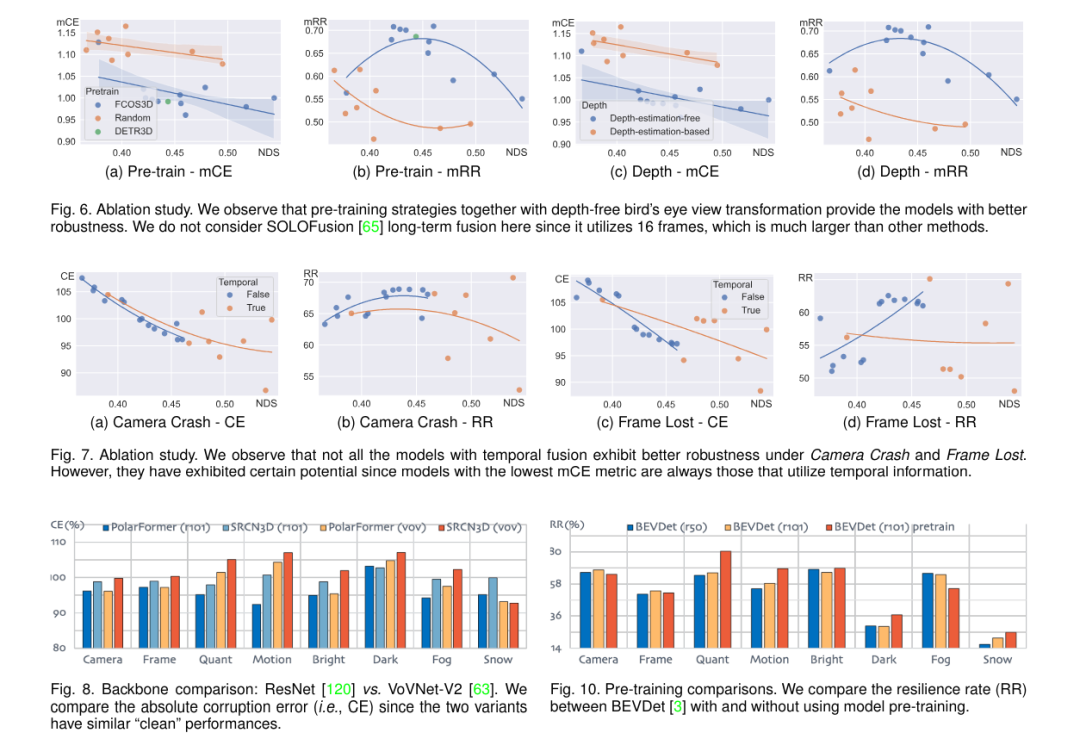
2)Model Pre-Training
3)Temporal Fusion
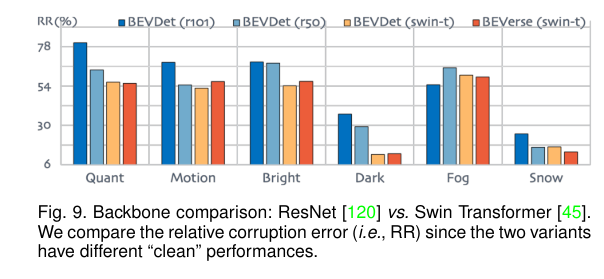
4)Backbone
5)Corruptions
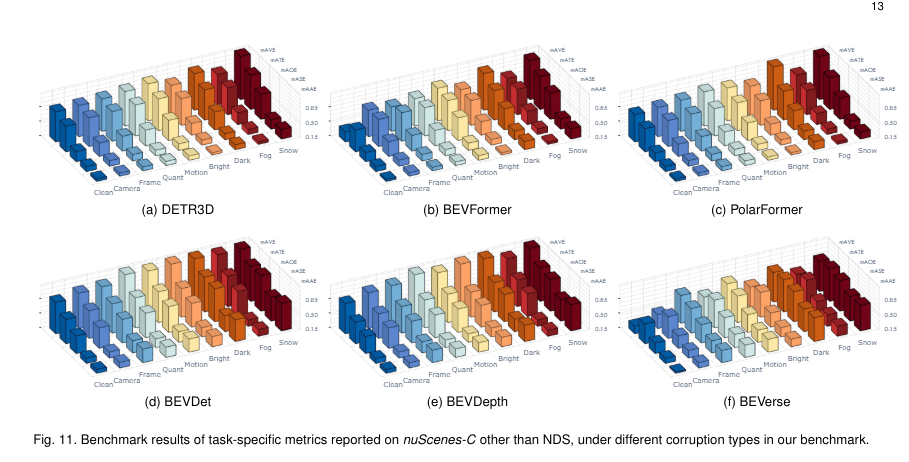
6)Detailed Metrics
参考

版权声明
本文仅作者转发或者创作,不代表旺旺头条立场。
如有侵权请联系站长删除
相关文章




发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。