 旺旺头条
旺旺头条端到端智能驾驶核心技术全景:从BEV感知到4D自动标注实战 | 盖世大学堂

更多课程信息,请加微信(gasgoo2017)联系咨询
头部芯片企业智能驾驶部门担任自动标注算法负责人。对整个智驾系统的历代发展有深入的理解和实践经验,曾从0到1搭建完整的智驾云端自动标注系统。同时也在ICRA/IROS等机器人顶会上发表过多篇论文。
1、对智能驾驶技术的发展历史和未来方向有全面的了解;
2、深入理解智能驾驶相关的传感器特性及其使用和过程中的难点和解决方案;
3、掌握基于当前AI大模型,Transformer等技术的基础原理及其在智能驾驶领域的应用;
4、熟悉智能驾驶BEV感知技术和对应的4D自动标注及数据闭环整体;
5、掌握端到端自动驾驶不同的技术路线和实现方式,并推导端到端智驾未来的发展方向
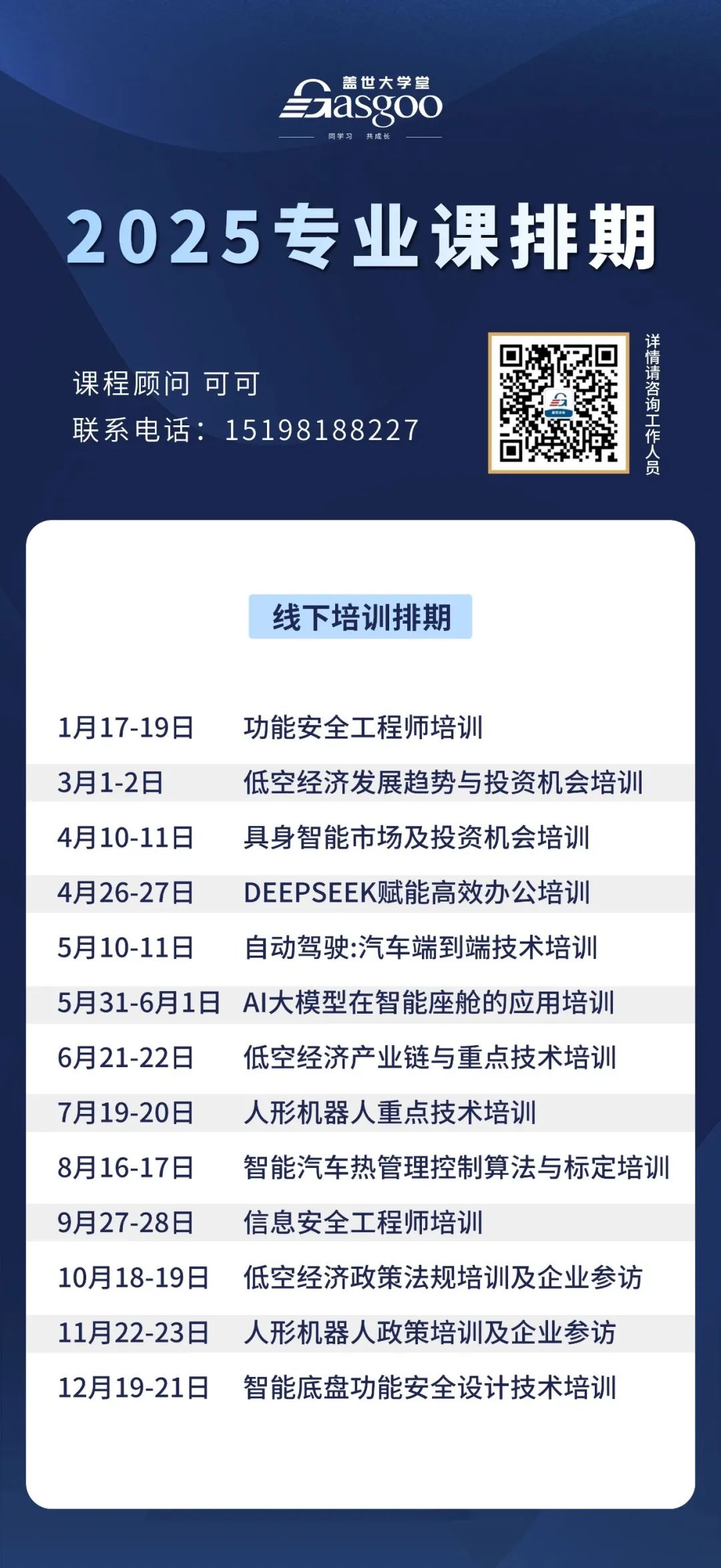
名称:智驾端到端技术培训
时间:2025年5月10日至11日(周末)
地点:上海
费用:3580元/人
*同一公司3(含3人)人以上享受团队价格:3000元/人,费用不含其它食宿费
 |  |
立即扫码报名 | 联系咨询:可可 |

版权声明
本文仅作者转发或者创作,不代表旺旺头条立场。
如有侵权请联系站长删除
相关文章




发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。